


Omega步進(jìn)電機(jī)及驅(qū)動器
步進(jìn)電機(jī)是一種將數(shù)字量脈沖轉(zhuǎn)換為機(jī)械軸旋轉(zhuǎn)的無刷同步電動機(jī)。 步進(jìn)電機(jī)的每一轉(zhuǎn)均細(xì)分為若干個離散的步(許多情況下為 200 步),執(zhí)行每一步時都必須向電機(jī)發(fā)送單獨的脈沖。 步進(jìn)電機(jī)每次僅能執(zhí)行一步,并且每一步的大小相同。 由于每個脈沖會使電機(jī)旋轉(zhuǎn)一個精確的角度(通常為 1.8°),因此無需反饋機(jī)制即可控制電機(jī)的位置。 隨著數(shù)字量脈沖頻率的增加,步進(jìn)運(yùn)動逐漸變?yōu)檫B續(xù)的旋轉(zhuǎn),其轉(zhuǎn)速直接與脈沖頻率成正比。 由于步進(jìn)電機(jī)具有成本低、可靠性高、低速高轉(zhuǎn)矩以及結(jié)構(gòu)簡單堅固等特點,因此適用于幾乎所有環(huán)境,在工業(yè)和商業(yè)應(yīng)用中得到廣泛的使用。
步進(jìn)電機(jī)的優(yōu)點
- 電機(jī)的旋轉(zhuǎn)角度與輸入脈沖成正比。
- 電機(jī)在停轉(zhuǎn)時達(dá)到滿轉(zhuǎn)矩(如果繞組已激磁)。
- 由于好的步進(jìn)電機(jī)每步精度在 3% 到 5% 之間,并且每步的誤差不會積累到下一步,因此有較好的位置精度和運(yùn)動重復(fù)性。
- 具有極佳的起動/停止/反轉(zhuǎn)響應(yīng)。
- 由于電機(jī)中無接觸電刷,可靠性極高。 因此,步進(jìn)電機(jī)的使用壽命僅取決于軸承的壽命。
- 步進(jìn)電機(jī)對數(shù)字量輸入脈沖做出響應(yīng),因而可實現(xiàn)開環(huán)控制,從而使電機(jī)結(jié)構(gòu)得到簡化并降低了控制成本。
- 負(fù)載直接耦合到轉(zhuǎn)軸時,可在極低速度下實現(xiàn)同步旋轉(zhuǎn)。
- 由于轉(zhuǎn)速正比于輸入脈沖的頻率,因此可實現(xiàn)較寬的轉(zhuǎn)速范圍。
步進(jìn)電機(jī)的類型
步進(jìn)電機(jī)分三種基本類型: 變磁阻式、永磁式和混合式。 本文主要討論混合式電機(jī),這種電機(jī)綜合了變磁阻式電機(jī)和永磁式電機(jī)的最佳特性。 混合式電機(jī)由多齒定子磁極和永磁轉(zhuǎn)子組成(請參見圖 A)。 標(biāo)準(zhǔn)混合式電機(jī)(如 OmegamationTM 提供的型號)有 200 個轉(zhuǎn)子齒,每步的旋轉(zhuǎn)角度為 1.8o。 這種電機(jī)在極高的步速下表現(xiàn)出較高的靜態(tài)和動態(tài)轉(zhuǎn)矩,因此廣泛適用于各種商業(yè)應(yīng)用,包括計算機(jī)磁盤驅(qū)動器、打印機(jī)/繪圖儀以及 CD 播放器。 步進(jìn)電機(jī)還可用于一些工業(yè)和科學(xué)應(yīng)用,包括機(jī)器人、機(jī)床、貼裝機(jī)、自動切線接線機(jī)以及精準(zhǔn)流體控制設(shè)備。
步進(jìn)模式
步進(jìn)電機(jī)的“步進(jìn)模式”包括整步、半步和微步三種。 任何步進(jìn)電機(jī)的步進(jìn)模式輸出類型都取決于驅(qū)動器的設(shè)計。 Omegamation? 提供帶有整步/半步模式可選開關(guān)的步進(jìn)電機(jī)驅(qū)動器以及分辨率可由開關(guān)或軟件選擇的微步驅(qū)動器。
整步
標(biāo)準(zhǔn)混合式步進(jìn)電機(jī)的轉(zhuǎn)子齒數(shù)為 200,也就是說電機(jī)軸旋轉(zhuǎn)一周需要 200 個整步。 200 步除以一圈 360o 等于整步旋轉(zhuǎn)角度 1.8o。 通常,通過雙繞組激磁并交替反轉(zhuǎn)電流方向,可實現(xiàn)整步模式。 驅(qū)動器的一個數(shù)字量脈沖基本等同于一步。
半步
半步可以簡單地理解為步進(jìn)電機(jī)每旋轉(zhuǎn)一周需要 400 步。 在這種模式中,將交替給兩個繞組激磁,因此轉(zhuǎn)子僅旋轉(zhuǎn)一半的距離 (0.9o)。 雖然半步模式的轉(zhuǎn)矩比整步模式要小約 30%,但其實現(xiàn)的運(yùn)動更為平穩(wěn)。
微步
微步模式是相對較新的一項電機(jī)技術(shù),它可以更精細(xì)地控制電機(jī)繞組的電流,從而在兩極間進(jìn)一步細(xì)分出更多的位置。 Omegamation 的步進(jìn)驅(qū)動器可將一個整步 (1.8o) 細(xì)分為 256 個微步,使每轉(zhuǎn)的步數(shù)達(dá)到 51,200 步(0.007o/步)。 微步模式通常用于需要在較寬轉(zhuǎn)速范圍內(nèi)實現(xiàn)精確定位和更平穩(wěn)運(yùn)動的應(yīng)用。 與半步模式類似,微步模式的轉(zhuǎn)矩比整步模式要小約 30%。
線性運(yùn)動控制
步進(jìn)電機(jī)的旋轉(zhuǎn)運(yùn)動可通過絲杠/蝸輪驅(qū)動系統(tǒng)(請參見圖 B)轉(zhuǎn)換為直線運(yùn)動。 絲杠的導(dǎo)程(又稱螺距)是螺絲旋轉(zhuǎn)一周經(jīng)過的直線距離。 如果導(dǎo)程等于每轉(zhuǎn)一英寸并且每轉(zhuǎn)有 200 個整步,則絲杠系統(tǒng)的分辨力為每步 0.005 英寸。 使用微步模式下的步進(jìn)電機(jī)/驅(qū)動系統(tǒng)可以實現(xiàn)更為精細(xì)的分辨力。
串聯(lián)與并聯(lián)
步進(jìn)電機(jī)有兩種連接方式:串聯(lián)和并聯(lián)。 串聯(lián)時的電感較高,因此可在低速時提供較高的轉(zhuǎn)矩。 并聯(lián)可降低電感,從而在較高的轉(zhuǎn)速下增加轉(zhuǎn)矩。
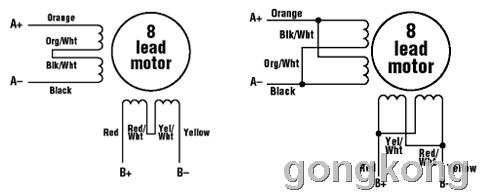
| Series connection | Parallel connection | ||
驅(qū)動器技術(shù)概覽 步進(jìn)電機(jī)的驅(qū)動器可從分度器或控制系統(tǒng)接收步進(jìn)和方向信號,并將這些信號轉(zhuǎn)換為用于運(yùn)行步進(jìn)電機(jī)的電信號。 電機(jī)軸的每一步都需要一個脈沖。 在整步模式下,標(biāo)準(zhǔn)的 200 步電機(jī)旋轉(zhuǎn)一周需要 200 步脈沖。 轉(zhuǎn)速與脈沖頻率直接成正比。 某些驅(qū)動器帶有板載振蕩器,因此可通過外部模擬量信號或操縱桿設(shè)置電機(jī)轉(zhuǎn)速。 分度器概覽 分度器(又稱控制器)可為驅(qū)動器提供步進(jìn)和方向輸出。 大部分應(yīng)用還需要分度器額外管理其它控制功能,包括加速、減速、每秒步數(shù)和距離。 分度器還可收發(fā)并控制許多其它的外部信號。 獨立操作在獨立模式中,分度器可不依賴主機(jī)計算機(jī)而單獨工作。 運(yùn)動程序下載到非易失性存儲器中后,可通過多種類型的操作員界面(例如鍵盤或觸摸屏)進(jìn)行啟動,或者也可以利用輔助 I/O 輸入通過開關(guān)進(jìn)行啟動。 獨立式步進(jìn)電機(jī)控制系統(tǒng)通常都封裝有驅(qū)動器和電源,以及可選的編碼器反饋,適用于需要失速檢測和準(zhǔn)確電機(jī)位置補(bǔ)償?shù)?/span>“閉環(huán)”應(yīng)用。 多軸控制在許多運(yùn)動應(yīng)用中,都需要控制多臺步進(jìn)電機(jī)。 這種情況下可以使用多軸控制系統(tǒng)。 例如,HUB 444 網(wǎng)絡(luò)集線器最多可以連接四臺步進(jìn)電機(jī),每個驅(qū)動器連接一臺單獨的步進(jìn)電機(jī)。 網(wǎng)絡(luò)集線器可為需要高度同步的應(yīng)用(如圓弧或直線插補(bǔ))提供運(yùn)動協(xié)調(diào)功能。
步進(jìn)電機(jī)的選型取決于具體應(yīng)用對轉(zhuǎn)矩和轉(zhuǎn)速的要求。 可使用電機(jī)的轉(zhuǎn)矩-轉(zhuǎn)速曲線(可在每個驅(qū)動器的技術(shù)參數(shù)中找到,請參見圖 C 中的示例)選擇適合的電機(jī)。 Omegamation 系列的每種步進(jìn)驅(qū)動器均提供了其適用電機(jī)的轉(zhuǎn)矩-速度曲線。 如果多種步進(jìn)電機(jī)都可滿足轉(zhuǎn)矩和轉(zhuǎn)速要求,則根據(jù)運(yùn)動系統(tǒng)的需求(步進(jìn)/方向、獨立可編程、模擬量輸入、微步)選擇合適的驅(qū)動器,然后選擇該驅(qū)動器適用的一臺電機(jī)。 推薦電機(jī)清單是制造商為確保步進(jìn)電機(jī)與驅(qū)動器組合具有最優(yōu)性能而進(jìn)行廣泛測試 后所確定的。 | |||
| | |||
| 步進(jìn)和方向 | |||
| 振蕩器 | |||
| 獨立可編程 | |||
| 高性能 | |||









 投訴建議
投訴建議
提交

OMEGA紅外線溫度計

OMEGA無紙記錄儀

OMEGA 通用可編程信號發(fā)送器

OMEGACLAD? 雙對礦物絕緣(MI)電纜

OMEGA工業(yè)測量微信公眾號現(xiàn)已隆重上線